| 內容介紹 | |
-
出版社:清華大學
-
ISBN:9787302510994
-
作者:編者:章毓晉
-
頁數:889
-
出版日期:2018-10-01
-
印刷日期:2018-10-01
-
包裝:精裝
-
開本:16開
-
版次:4
-
印次:1
-
字數:2047千字
-
-
圖像工程由清華大學章毓晉教授編著,是圖像領域**經典,已印刷60多次,20多萬冊。全套書分為圖像處理、分析、理解三個層次(三冊),全面涵蓋基本概念、基本原理、典型方法、實用技術以及**上有關研究的新成果。**版獲全國普通高等學校**教材一等獎;第2版評為全國普通高等教育“十一五”精品教材;第3版評為“十二五”普通高等教育本科***規劃教材,2013年北京高等教育精品教材。
-
\"本書為《圖像工程》(第4版)的上、中、下冊合訂本,全面介紹圖像工程的第一層次——圖像處理,圖像工程的第二層次——圖像分析,圖像工程的第三層次——圖像理解的基本概念、基本原理、典型方法、實用技術以及國際上有關研究的新成果。
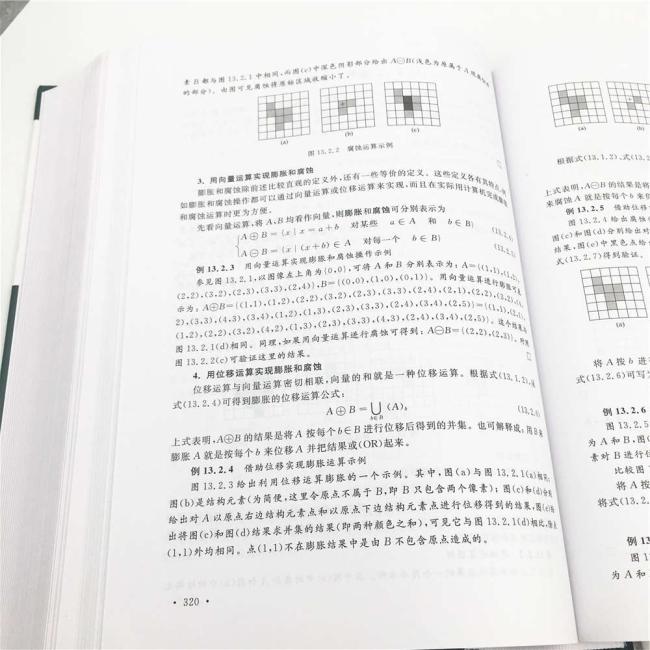
上冊主要分4個單元,第1單元(包含第2~4章)介紹圖像增強技術,第2單元(包含第5~8章)介紹圖像恢復技術,第3單元(包含第9~11章)介紹圖像編碼技術,第4單元(包含第12~15章)介紹拓展圖像技術。中冊主要分4個單元,第1單元(包含第2~5章)介紹圖像分割技術,第2單元(包含第6~8章)介紹對分割出目標的表達描述技術,第3單元(包含第9~12章)介紹目標特性分析技術,第4單元(包含第13~15章)介紹一些相關的數學工具。下冊主要分4個單元,第1單元(包含第2~5章)介紹圖像采集表達技術,第2單元(包含第6~9章)介紹景物重建技術,第3單元(包含第10~12章)介紹場景解釋技術,第4單元(包含第13~15章)介紹3個研究方向的示例。
書中提供了大量例題、思考題和練習題,並對部分練習題提供了解答或解題思路。
本書可作為信號與信息處理、通信與信息繫統、電子與通信工程、模式識別與智能繫統、計算機視覺等學科大學本科和研究生專業基礎或專業課教材,也可供信息與通信工程、電子科學與技術、計算機科學與技術、測控技術與儀器、機器人自動化、生物醫學工程、光學、電子醫療設備研制、遙感、測繪和軍事偵察等領域的科技工作者參考。\"\"本書為《圖像工程》(第4版)的上、中、下冊合訂本,全面介紹圖像工程的第一層次——圖像處理,圖像工程的第二層次——圖像分析,圖像工程的第三層次——圖像理解的基本概念、基本原理、典型方法、實用技術以及國際上有關研究的新成果。
上冊主要分4個單元,第1單元(包含第2~4章)介紹圖像增強技術,第2單元(包含第5~8章)介紹圖像恢復技術,第3單元(包含第9~11章)介紹圖像編碼技術,第4單元(包含第12~15章)介紹拓展圖像技術。中冊主要分4個單元,第1單元(包含第2~5章)介紹圖像分割技術,第2單元(包含第6~8章)介紹對分割出目標的表達描述技術,第3單元(包含第9~12章)介紹目標特性分析技術,第4單元(包含第13~15章)介紹一些相關的數學工具。下冊主要分4個單元,第1單元(包含第2~5章)介紹圖像采集表達技術,第2單元(包含第6~9章)介紹景物重建技術,第3單元(包含第10~12章)介紹場景解釋技術,第4單元(包含第13~15章)介紹3個研究方向的示例。
書中提供了大量例題、思考題和練習題,並對部分練習題提供了解答或解題思路。
本書可作為信號與信息處理、通信與信息繫統、電子與通信工程、模式識別與智能繫統、計算機視覺等學科大學本科和研究生專業基礎或專業課教材,也可供信息與通信工程、電子科學與技術、計算機科學與技術、測控技術與儀器、機器人自動化、生物醫學工程、光學、電子醫療設備研制、遙感、測繪和軍事偵察等領域的科技工作者參考。\"
-
總目錄
上冊圖像處理
第1章緒論
**單元圖像增強
第2章空域增強:點操作
第3章空域增強:模板操作
第4章頻域圖像增強
第2單元圖像恢復
第5章圖像消噪和恢復
第6章圖像校正和修補
第7章圖像去霧
第8章圖像投影重建
第3單元圖像編碼
第9章圖像編碼基礎
**0章圖像變換編碼
**1章*多圖像編碼方法
第4單元拓展技術
**2章圖像信息安全
**3章彩色圖像處理
**4章視頻圖像處理
**5章多尺度圖像處理
附錄A圖像**標準
部分思考題和練習題解答
參考文獻
主題索引
中冊圖像分析
第1章緒論
**單元圖像分割
第2章圖像分割基礎
第3章典型分割算法
第4章分割技術擴展
第5章分割評價比較
第2單元表達描述
第6章目標表達
第7章目標描述
第8章測量和誤差分析
第3單元特性分析
第9章紋理分析
**0章形狀分析
**1章運動分析
**2章顯著性和屬性
第4單元數學工具
**3章數學形態學:二值
**4章數學形態學:灰度
**5章圖像識別
附錄A人臉和表情識別
部分思考題和練習題解答
參考文獻
主題索引
下冊圖像理解
第1章緒論
**單元采集表達
第2章攝像機成像
第3章壓縮感知與成像
第4章深度信息采集
第5章3D景物表達
第2單元景物重建
第6章立體視覺: 雙目
第7章立體視覺: 多目
第8章景物恢復: 多圖像
第9章景物恢復: 單圖像
第3單元場景解釋
**0章知識表達和推理
**1章廣義匹配
**2章場景分析和語義解釋
第4單元研究示例
**3章多傳感器圖像信息融合
**4章基於內容的圖像和視頻檢索
**5章時空行為理解
附錄A視覺和視知覺
部分思考題和練習題解答
參考文獻
主題索引總目錄
上冊圖像處理
第1章緒論
**單元圖像增強
第2章空域增強:點操作
第3章空域增強:模板操作
第4章頻域圖像增強
第2單元圖像恢復
第5章圖像消噪和恢復
第6章圖像校正和修補
第7章圖像去霧
第8章圖像投影重建
第3單元圖像編碼
第9章圖像編碼基礎
**0章圖像變換編碼
**1章*多圖像編碼方法
第4單元拓展技術
**2章圖像信息安全
**3章彩色圖像處理
**4章視頻圖像處理
**5章多尺度圖像處理
附錄A圖像**標準
部分思考題和練習題解答
參考文獻
主題索引
中冊圖像分析
第1章緒論
**單元圖像分割
第2章圖像分割基礎
第3章典型分割算法
第4章分割技術擴展
第5章分割評價比較
第2單元表達描述
第6章目標表達
第7章目標描述
第8章測量和誤差分析
第3單元特性分析
第9章紋理分析
**0章形狀分析
**1章運動分析
**2章顯著性和屬性
第4單元數學工具
**3章數學形態學:二值
**4章數學形態學:灰度
**5章圖像識別
附錄A人臉和表情識別
部分思考題和練習題解答
參考文獻
主題索引
下冊圖像理解
第1章緒論
**單元采集表達
第2章攝像機成像
第3章壓縮感知與成像
第4章深度信息采集
第5章3D景物表達
第2單元景物重建
第6章立體視覺: 雙目
第7章立體視覺: 多目
第8章景物恢復: 多圖像
第9章景物恢復: 單圖像
第3單元場景解釋
**0章知識表達和推理
**1章廣義匹配
**2章場景分析和語義解釋
第4單元研究示例
**3章多傳感器圖像信息融合
**4章基於內容的圖像和視頻檢索
**5章時空行為理解
附錄A視覺和視知覺
部分思考題和練習題解答
參考文獻
主題索引
-
第3章空域增強: 模板操作
圖像是由其基本單元——像素組成的,像素在圖像空間是按某種規律排列的,互相之間有一定的聯繫。在圖像處理中,可以且需要根據像素之間的聯繫來對圖像進行加工。
在真實圖像中,相鄰或接近的像素之間有*密切的聯繫,常可結合在一起考慮。在圖像處理中,常用模板來組合相鄰或接近的像素,根據這些像素的統計特性或局部運算來進行操作,稱為模板操作或模板運算。利用模板操作來進行圖像增強常稱為濾波,可以是線性的也可以是非線性的。由於模板操作涉及圖像中的局部區域,所以也可方便地進行局部增強。
根據上述的討論,本章各節將安排如下。
3.1節先對像素的鄰域以及像素間的各種聯繫,包括像素間的鄰接、連接和連通,像素集合的鄰接和連通,以及像素之間的距離進行介紹。
3.2節討論模板操作的基本原理和方法(主要是模板卷積操作和模板排序操作),還討論模板運算功能的分類情況。
3.3節介紹一些典型的利用模板操作實現的線性濾波方法,其功能包括平滑和銳化圖像。
3.4節介紹一些典型的非線性濾波方法,其功能也包括平滑和銳化圖像。非線性濾波也可與線性濾波方法結合使用。
3.5節分析利用模板操作進行圖像局部增強的原理、思路和效果。
3.1像素間聯繫
模板操作涉及對一組像素的同時操作,為此需要對像素間聯繫有一定了解。像素之間的聯繫有多種,既有空間上的聯繫也有幅度上的聯繫。下面介紹鄰域、鄰接、連接和連通等基本概念。
3.1.1像素的鄰域和鄰接
對一個像素來說,與它關繫*密切的常是它的鄰近像素/近鄰像素,它們組成該像素的鄰域。根據對一個坐標為(x,y)的像素p的近鄰像素的不同定義,可以得到由不同近鄰像素所組成的不同的鄰域。常見的像素鄰域主要有如下3種形式(*多形式可見本套書中冊)。
(1) 4鄰域N4(p)
它由像素p的水平(左,右)和垂直(上,下)共4個近鄰像素組成,這些近鄰像素的坐標分別是(x+1,y),(x-1,y),(x,y+1),(x,y-1)。圖3.1.1(a)給出4鄰域的一個示例,組成p的4鄰域的4個像素均用r表示,它們與p有公共的邊。
圖3.1.1像素的鄰域
(2) 對角鄰域ND(p)
它由p的對角(左上,右上,左下,右下)共4個近鄰像素組成,這些近鄰像素的坐標分別是(x+1,y+1),(x+1,y-1),(x-1,y+1),(x-1,y-1)。圖3.1.1(b)給出對角鄰域的一個示例,組成p的對角鄰域的4個像素均用s表示,它們與p有公共的頂角。對角鄰域一般不單獨使用。
(3) 8鄰域N8(p)
它由p的4個4鄰域像素加上4個對角鄰域像素合起來構成。圖3.1.1(c)給出8鄰域的一個示例,其中組成p的8鄰域的4個4鄰域像素用r表示,4個對角鄰域像素用s表示。
需要指出,根據上述對鄰域的定義,如果像素p本身處在圖像的邊緣,則它的N4(p)、ND(p)和N8(p)中的若干個像素會落在圖像之外。在圖3.1.1中,如果將p的8鄰域看作一幅3×3的圖像,考慮一下N4(r)、ND(s)、N8(r)和N8(s),就很容易理解這種情況。處理這種情況的方法可見第3章空域增強: 模板操作
圖像是由其基本單元——像素組成的,像素在圖像空間是按某種規律排列的,互相之間有一定的聯繫。在圖像處理中,可以且需要根據像素之間的聯繫來對圖像進行加工。
在真實圖像中,相鄰或接近的像素之間有*密切的聯繫,常可結合在一起考慮。在圖像處理中,常用模板來組合相鄰或接近的像素,根據這些像素的統計特性或局部運算來進行操作,稱為模板操作或模板運算。利用模板操作來進行圖像增強常稱為濾波,可以是線性的也可以是非線性的。由於模板操作涉及圖像中的局部區域,所以也可方便地進行局部增強。
根據上述的討論,本章各節將安排如下。
3.1節先對像素的鄰域以及像素間的各種聯繫,包括像素間的鄰接、連接和連通,像素集合的鄰接和連通,以及像素之間的距離進行介紹。
3.2節討論模板操作的基本原理和方法(主要是模板卷積操作和模板排序操作),還討論模板運算功能的分類情況。
3.3節介紹一些典型的利用模板操作實現的線性濾波方法,其功能包括平滑和銳化圖像。
3.4節介紹一些典型的非線性濾波方法,其功能也包括平滑和銳化圖像。非線性濾波也可與線性濾波方法結合使用。
3.5節分析利用模板操作進行圖像局部增強的原理、思路和效果。
3.1像素間聯繫
模板操作涉及對一組像素的同時操作,為此需要對像素間聯繫有一定了解。像素之間的聯繫有多種,既有空間上的聯繫也有幅度上的聯繫。下面介紹鄰域、鄰接、連接和連通等基本概念。
3.1.1像素的鄰域和鄰接
對一個像素來說,與它關繫*密切的常是它的鄰近像素/近鄰像素,它們組成該像素的鄰域。根據對一個坐標為(x,y)的像素p的近鄰像素的不同定義,可以得到由不同近鄰像素所組成的不同的鄰域。常見的像素鄰域主要有如下3種形式(*多形式可見本套書中冊)。
(1) 4鄰域N4(p)
它由像素p的水平(左,右)和垂直(上,下)共4個近鄰像素組成,這些近鄰像素的坐標分別是(x+1,y),(x-1,y),(x,y+1),(x,y-1)。圖3.1.1(a)給出4鄰域的一個示例,組成p的4鄰域的4個像素均用r表示,它們與p有公共的邊。
圖3.1.1像素的鄰域
(2) 對角鄰域ND(p)
它由p的對角(左上,右上,左下,右下)共4個近鄰像素組成,這些近鄰像素的坐標分別是(x+1,y+1),(x+1,y-1),(x-1,y+1),(x-1,y-1)。圖3.1.1(b)給出對角鄰域的一個示例,組成p的對角鄰域的4個像素均用s表示,它們與p有公共的頂角。對角鄰域一般不單獨使用。
(3) 8鄰域N8(p)
它由p的4個4鄰域像素加上4個對角鄰域像素合起來構成。圖3.1.1(c)給出8鄰域的一個示例,其中組成p的8鄰域的4個4鄰域像素用r表示,4個對角鄰域像素用s表示。
需要指出,根據上述對鄰域的定義,如果像素p本身處在圖像的邊緣,則它的N4(p)、ND(p)和N8(p)中的若干個像素會落在圖像之外。在圖3.1.1中,如果將p的8鄰域看作一幅3×3的圖像,考慮一下N4(r)、ND(s)、N8(r)和N8(s),就很容易理解這種情況。處理這種情況的方法可見3.2節。
在上述定義的像素鄰域中,一個像素與其鄰域中的像素是有接觸的,也稱為鄰接的。圖像中兩個像素是否鄰接就看它們是否接觸。鄰接表示了一種像素間的空間接近關繫。
根據像素鄰域的不同,鄰接也對應分成3種:
4鄰接,對角鄰接,8鄰接。
3.1.2像素間的連接和連通
兩個像素的鄰接僅與它們的空間位置有關,而像素間的連接和連通還要考慮像素的屬性值(以下討論中以灰度值為例)之間的關繫。
1. 像素的連接
對兩個像素來說,要確定它們是否連接需要考慮兩點: ①它們在空間上是否鄰接; ②它們的灰度值是否滿足某個特定的相似準則(例如它們灰度值相等,或同在一個灰度值集合中取值)。舉例來說,在一幅隻有0和1灰度的二值圖中,
隻有當
一個像素和在它鄰域中的像素
具有相同的灰度值時纔可以說是連接的。
設用V表示定義連接的灰度值集合。例如在一幅二值圖中,為考慮兩個灰度值為1的像素之間的連接,可取V={1}。又如在一幅有256個灰度級的灰度圖中,考慮灰度值為128~150的兩個像素的連接時,取V={128,129,…,149,150}。參見圖3.1.1,可討論以下兩種常用的連接。
(1) 4連接: 2個像素p和r在V中取值且r在N4(p)中,則它們為4連接。
(2) 8連接: 2個像素p和r在V中取值且r在N8(p)中,則它們為8連接。
可以看出,兩個連接的像素一定是鄰接的,但兩個鄰接的像素不一定是連接的。
2. 像素的連通
在像素連接的基礎上,可進一步討論和定義像素之間的連通。實際上,像素連通可以看作是像素連接的一種推廣。為討論連通先來定義兩個像素間的通路。從具有坐標(x,y)的像素p到具有坐標(s,t)的像素q的一條通路由一繫列具有坐標(x0,y0),(x1,y1),…,(xn,yn)的獨立像素組成。這裡(x0,y0)=(x,y),(xn,yn)=(s,t),且(xi,yi)與(xi-1,yi-1)鄰接,其中1≤i≤n,n為通路長度。根據所采用的鄰接定義不同,可定義或得到不同的通路,如4通路、8通路。這裡對通路的定義僅僅考慮了像素坐標空間上的聯繫(相當於對鄰接關繫的推廣),沒有考慮像素屬性空間上的聯繫。
上述通路建立了兩個像素p和q之間的空間鄰接聯繫。進一步,如果這條通路上的所有像素的灰度值均滿足某個特定的相似準則,即兩兩鄰接的像素也是兩兩連接的,則可以說像素p和q是連通的。同樣根據所采用的連接3.2節。
在上述定義的像素鄰域中,一個像素與其鄰域中的像素是有接觸的,也稱為鄰接的。圖像中兩個像素是否鄰接就看它們是否接觸。鄰接表示了一種像素間的空間接近關繫。
根據像素鄰域的不同,鄰接也對應分成3種:
4鄰接,對角鄰接,8鄰接。
3.1.2像素間的連接和連通
兩個像素的鄰接僅與它們的空間位置有關,而像素間的連接和連通還要考慮像素的屬性值(以下討論中以灰度值為例)之間的關繫。
1. 像素的連接
對兩個像素來說,要確定它們是否連接需要考慮兩點: ①它們在空間上是否鄰接; ②它們的灰度值是否滿足某個特定的相似準則(例如它們灰度值相等,或同在一個灰度值集合中取值)。舉例來說,在一幅隻有0和1灰度的二值圖中,
隻有當
一個像素和在它鄰域中的像素
具有相同的灰度值時纔可以說是連接的。
設用V表示定義連接的灰度值集合。例如在一幅二值圖中,為考慮兩個灰度值為1的像素之間的連接,可取V={1}。又如在一幅有256個灰度級的灰度圖中,考慮灰度值為128~150的兩個像素的連接時,取V={128,129,…,149,150}。參見圖3.1.1,可討論以下兩種常用的連接。
(1) 4連接: 2個像素p和r在V中取值且r在N4(p)中,則它們為4連接。
(2) 8連接: 2個像素p和r在V中取值且r在N8(p)中,則它們為8連接。
可以看出,兩個連接的像素一定是鄰接的,但兩個鄰接的像素不一定是連接的。
2. 像素的連通
在像素連接的基礎上,可進一步討論和定義像素之間的連通。實際上,像素連通可以看作是像素連接的一種推廣。為討論連通先來定義兩個像素間的通路。從具有坐標(x,y)的像素p到具有坐標(s,t)的像素q的一條通路由一繫列具有坐標(x0,y0),(x1,y1),…,(xn,yn)的獨立像素組成。這裡(x0,y0)=(x,y),(xn,yn)=(s,t),且(xi,yi)與(xi-1,yi-1)鄰接,其中1≤i≤n,n為通路長度。根據所采用的鄰接定義不同,可定義或得到不同的通路,如4通路、8通路。這裡對通路的定義僅僅考慮了像素坐標空間上的聯繫(相當於對鄰接關繫的推廣),沒有考慮像素屬性空間上的聯繫。
上述通路建立了兩個像素p和q之間的空間鄰接聯繫。進一步,如果這條通路上的所有像素的灰度值均滿足某個特定的相似準則,即兩兩鄰接的像素也是兩兩連接的,則可以說像素p和q是連通的。同樣根據所采用的連接
| | |
|